Для организации беспроводного обмена данными между двумя платами Arduino оптимальным решением станет использование Bluetooth-модулей серии HC-05 или HC-06. Эти модули обеспечивают стабильную связь на расстоянии до 10 метров при скорости передачи данных до 3 Мбит/с, что подходит для большинства простых проектов обмена командами и показателями датчиков.
Ключевым этапом является настройка одного модуля в режим мастер, а второго – в режим слейв. Это позволяет автоматически устанавливать соединение без ручного вмешательства после начальной конфигурации. Рекомендуется использовать AT-команды для смены режимов и настройки скорости передачи, поскольку неправильные параметры могут привести к нестабильной работе или отсутствию связи.
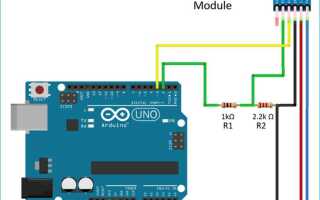
Для подключения модулей к Arduino необходимо правильно организовать последовательный интерфейс UART: стандартный HC-05 работает на 3.3 В логике, что требует применения понижающих резисторов при соединении с 5 В логикой Arduino. Обмен данными реализуется через последовательную передачу байтов, что обеспечивает минимальную задержку и простоту программирования, особенно при использовании готовых библиотек SoftwareSerial или HardwareSerial.
Выбор совместимых Bluetooth модулей для Arduino

Важно обращать внимание на версию Bluetooth. Модули HC-05 и HC-06 используют классический Bluetooth 2.0+EDR с скоростью передачи до 3 Мбит/с, что обеспечивает надежную передачу данных на расстоянии до 10 метров без сложных настроек. Модули BLE (Bluetooth Low Energy), такие как HM-10, хотя и энергосберегающие, требуют специальной библиотеки и настроек, а также поддерживают другой профиль связи, что осложняет прямую совместимость с классическими модулями.
Питание модулей HC-05 и HC-06 стандартизировано на 3,3 В, однако большинство выпускаемых модулей имеют встроенный стабилизатор, позволяющий подключать их к 5 В Arduino. При выборе стоит проверить наличие и тип уровневого преобразователя UART, поскольку Arduino с 5 В логикой может повредить 3,3 В вход модуля без соответствующей защиты.
Для надежной работы двух Bluetooth модулей между Arduino предпочтительны модули HC-05, где один настроен в мастер-режим, другой – в слейв-режим. Это обеспечивает стабильное соединение и минимизирует задержки при передаче. При необходимости использовать только слейв-устройства, оба Arduino должны быть подключены через центральное устройство, что усложняет схему.
Выбирая модули, обратите внимание на доступность документации и поддержку AT-команд для настройки. HC-05 и HC-06 широко документированы и имеют многочисленные примеры кода, что облегчает настройку параметров связи, скорости передачи и режима работы. Использование менее распространённых модулей может потребовать дополнительных затрат времени на интеграцию и тестирование.
Настройка Arduino для работы с Bluetooth модулем HC-05
Перед началом работы обязательно убедитесь, что напряжение на пине RX HC-05 не превышает 3.3 В, иначе используйте делитель напряжения или уровень логики для защиты модуля.
Стандартная скорость передачи данных HC-05 – 9600 бод. Настройте последовательный порт Arduino соответствующей скоростью, например: Serial.begin(9600); для аппаратного порта или bluetooth.begin(9600); для SoftwareSerial.
Для перевода модуля в режим настройки (AT-команд) подайте питание на модуль при зажатой кнопке или удерживайте пин KEY в высоком уровне до появления мигающего индикатора с интервалом 2 секунды. В режиме AT модуль принимает команды без установления соединения.
Используйте последовательный монитор с CR+LF окончанием строки и скоростью 38400 бод для управления HC-05 в режиме AT. Команда AT должна вернуть OK. Для изменения имени – AT+NAME=Имя, скорости – AT+UART=9600,0,0, роли – AT+ROLE=0 (slave) или AT+ROLE=1 (master).
После настройки перезагрузите модуль, отключив режим AT, и приступайте к обмену данными в основном режиме. Не забывайте, что HC-05 поддерживает только одно активное соединение одновременно.
Конфигурирование одного модуля в режим мастера, другого – в режим слейва
Для организации связи между двумя Bluetooth-модулями HC-05 необходимо задать одному из них режим мастера (Master), а другому – режим слейва (Slave). Настройка выполняется через командный режим AT-команд.
Первым шагом подключите каждый модуль к Arduino и переведите их в AT-режим. Для HC-05 это обычно делается удержанием кнопки на модуле при включении питания или подачей определённого сигнала на пин KEY/EN.
Для модуля, который станет мастером, используйте команду AT+ROLE=1. Она задаёт режим, в котором модуль инициирует соединение. Для слейва необходимо выполнить команду AT+ROLE=0, что позволяет принимать входящие подключения.
После установки ролей проверьте их с помощью команды AT+ROLE?. Мастер должен вернуть ROLE=1, слейв – ROLE=0.
Далее мастеру нужно задать адрес слейва для автоматического подключения. Узнать адрес слейва можно командой AT+ADDR? на слейве. На мастере выполните команду AT+CMODE=0 для подключения к конкретному адресу, затем AT+BIND=адрес_слейва (например, AT+BIND=0012,34,567890 без пробелов).
Также рекомендуется установить скорость передачи данных и параметры UART одинаковыми на обоих модулях для стабильной работы, например: AT+UART=9600,0,0.
После выполнения всех команд отключите модули от питания и запустите основной скетч Arduino для обмена данными. Мастер автоматически подключится к слейву, обеспечивая двунаправленный обмен по Bluetooth.
Прошивка и загрузка скетча для установления соединения между модулями
Для стабильного обмена данными между двумя Bluetooth-модулями HC-05 на Arduino необходимо корректно подготовить и загрузить скетч с учётом роли каждого устройства: мастер или слейв.
Основные шаги прошивки и загрузки:
- Настройка ролей модулей: Один модуль должен работать в режиме мастера, другой – слейва. Это задаётся AT-командами перед загрузкой основного скетча или программно в скетче.
- Подключение модулей к Arduino: RX модуля подключается к TX Arduino через делитель напряжения (3.3 В), TX – напрямую к RX Arduino.
- Использование SoftwareSerial: Для одновременной работы с Bluetooth и загрузки скетча рекомендуется SoftwareSerial на пинах 10 и 11 (или других, не конфликтующих с загрузчиком).
- Скетч для мастера: в setup прописать инициализацию порта, запуск поиска слейва и установку соединения с известным адресом слейва. Пример:
btSerial.begin(38400); // скорость HC-05 в режиме AT
btSerial.print("AT+ROLE=1"); // установка мастера
btSerial.print("AT+INIT"); // инициализация - Скетч для слейва: инициализация порта на 9600 (скорость по умолчанию), ожидание соединения мастера без необходимости поиска.
- Загрузка скетча: загружать сначала слейв, затем мастер, чтобы исключить конфликт при инициализации.
- Отладка: использовать Serial Monitor для контроля состояния соединения и передачи данных.
Пример кода для мастера и слейва следует адаптировать под конкретные задачи, учитывая частоту передачи данных и команды управления. Важна точная настройка скоростей и последовательностей AT-команд.
Передача данных по Bluetooth между двумя Arduino: примеры кода
Для организации обмена данными между двумя Arduino через Bluetooth чаще всего применяются модули HC-05 или HC-06. Один модуль настраивается в режиме мастер, другой – в режиме слейв. Ниже представлены минимальные примеры кода для передачи и приёма данных.
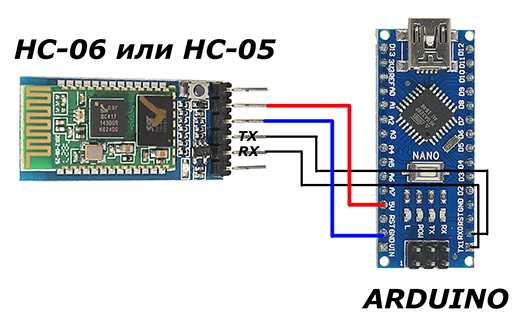
Подключение модулей:
- TX Bluetooth → RX Arduino
- RX Bluetooth → TX Arduino (через делитель напряжения для 5В Arduino)
- VCC → 5В
- GND → GND
Код для Arduino с модулем-мастером (передатчик):
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(10, 11); // RX, TX
void setup() {
Serial.begin(9600);
BTSerial.begin(9600);
}
void loop() {
String message = "Hello Slave";
BTSerial.println(message);
delay(1000);
}
Этот код передаёт строку «Hello Slave» каждую секунду. Важно, чтобы скорость передачи совпадала с настройками модуля (обычно 9600 бод).
Код для Arduino со слейв-модулем (приёмник):
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(10, 11); // RX, TX
void setup() {
Serial.begin(9600);
BTSerial.begin(9600);
}
void loop() {
if (BTSerial.available()) {
String received = BTSerial.readStringUntil('\n');
Serial.println("Received: " + received);
}
}
Рекомендации:
- Перед началом обмена убедитесь, что модули связаны и сопряжены.
- Для передачи чисел используйте функцию
BTSerial.print()вместоprintln()для экономии трафика. - При передаче сложных структур данных применяйте разделители или протоколы (например, JSON или CSV) для парсинга на приёмной стороне.
- Следите за таймингом – частые вызовы
delay()в коде могут снижать скорость передачи. - Используйте аппаратный последовательный порт, если нужно увеличить скорость обмена или уменьшить нагрузку CPU.
Обработка ошибок и проверка стабильности соединения

Для надежной передачи данных между двумя Bluetooth-модулями на Arduino необходима система контроля ошибок и мониторинга состояния соединения. В первую очередь, рекомендуется реализовать проверку CRC (циклического избыточного кода) для каждого пакета данных. Это позволяет выявить и отбросить поврежденные сообщения без ложного срабатывания.
Для обнаружения потери связи используйте таймауты на прием данных: если модуль не получил подтверждение или данные в течение заданного интервала (например, 500–1000 мс), следует инициировать повторную передачу или отправить запрос на переподключение.
Отслеживайте уровень сигнала RSSI, если модуль это поддерживает, – значение ниже -80 дБм указывает на ухудшение качества связи. В таких случаях можно увеличить интервал между пакетами или снизить скорость передачи для повышения устойчивости.
При организации обмена применяйте схему с подтверждениями (ACK). Отправитель ожидает ответ от приемника и в случае отсутствия ACK повторяет отправку ограниченное число раз (3–5). Это предотвращает потерю данных при кратковременных сбоях.
Для диагностики включите периодическую отправку «heartbeat»-сообщений, которые служат индикатором активности и позволяют обнаруживать разрывы соединения на уровне протокола, а не только аппаратного.
Используйте буферизацию данных для сглаживания пиков нагрузки и предотвращения потерь при временных сбоях связи. В Arduino-скетче буфер должен иметь размер не менее максимального объема данных, ожидаемых за одну передачу.
Регулярно проверяйте состояние UART-интерфейса на наличие ошибок фрейминга и переполнения буфера, чтобы исключить внутренние сбои, влияющие на качество связи.
Для повышения стабильности рекомендуется контролировать уровень питания модулей: нестабильное напряжение может вызывать прерывания связи.
Практические советы по улучшению дальности и качества связи
Для повышения дальности передачи данных между двумя Bluetooth-модулями на Arduino важно выбирать модули с поддержкой версии Bluetooth 4.0 и выше, так как они обладают улучшенной энергоэффективностью и стабильностью сигнала.
Размещайте модули на открытом пространстве, избегая металлических и бетонных преград. Металл снижает сигнал на 10–15 дБ, а бетонные стены могут ослаблять его до 30 дБ. Если преграды неизбежны, минимизируйте их толщину или используйте направленные антенны с коэффициентом усиления от 2 до 5 дБи.
Используйте внешние антенны, если это поддерживается модулем. Замена встроенной антенны на более мощную повышает дальность на 20–50% без увеличения энергопотребления.
Уменьшайте скорость передачи данных, выбирая минимально достаточную для задачи битрейт. Например, снижение скорости с 1 Мбит/с до 500 Кбит/с стабилизирует связь на больших расстояниях и снижает вероятность ошибок передачи.
Регулярно обновляйте прошивку модулей для устранения известных проблем с радиочастотным уровнем и улучшения алгоритмов модуляции.
Используйте сканирование и выбор канала с наименьшими помехами в диапазоне 2.4 ГГц. В условиях сильного Wi-Fi или других Bluetooth-устройств переключайтесь на свободные частоты с помощью встроенного Bluetooth-спектра.
Разместите питание Arduino и Bluetooth-модуля на отдельные стабильные источники с фильтрацией помех, чтобы избежать искажений сигнала из-за нестабильного питания.
Оптимизируйте положение модулей, ориентируя антенны параллельно друг другу, чтобы обеспечить максимальное направление передачи сигнала и минимизировать отражения.
Вопрос-ответ:
Как подключить два Bluetooth-модуля к Arduino для обмена информацией?
Для установки связи между двумя Bluetooth-модулями на Arduino необходимо правильно соединить контакты питания, передачи (TX) и приема (RX) между контроллерами и модулями. На одном из Arduino настраивается модуль как передатчик, на другом — как приемник. В программном коде нужно использовать последовательный порт для передачи данных, что позволяет отправлять и принимать сообщения между устройствами.
Какие типы Bluetooth-модулей подходят для создания связи между двумя Arduino?
Чаще всего используют модули HC-05 и HC-06. HC-05 более универсален — может работать и как мастер, и как слейв, а HC-06 только в режиме слейв. Для обмена информацией между двумя Arduino достаточно иметь хотя бы один HC-05, который будет выполнять роль ведущего устройства. Эти модули просты в подключении и поддерживают стандартный протокол Bluetooth Serial Port Profile (SPP), что облегчает работу с ними.
Как правильно настроить скорость передачи данных (baud rate) для Bluetooth-модулей на Arduino?
Скорость передачи должна быть одинаковой на обоих модулях и в коде Arduino. Стандартной является скорость 9600 бод. Если модули и контроллеры не совпадают по настройкам скорости, обмен данными не будет корректным. В некоторых случаях можно изменить параметр скорости с помощью AT-команд, но при обычном использовании достаточно настроить одинаковый baud rate в скетче и модуле.
Какие проблемы могут возникнуть при обмене данными между двумя Bluetooth-модулями на Arduino?
Основные трудности связаны с неправильным подключением контактов RX и TX, различиями в скорости передачи данных, а также с тем, что модули могут не соединяться, если они не находятся в режиме сопряжения. Также важно учитывать ограничение по расстоянию — Bluetooth обычно работает на расстоянии до 10 метров без препятствий. Возможны сбои в передаче, если в помещении сильные электромагнитные помехи.
Можно ли использовать несколько пар Bluetooth-модулей для расширения сети Arduino?
Теоретически возможно, однако стандартные модули HC-05/HC-06 рассчитаны на соединение один-к-одному. Для построения сети с несколькими устройствами понадобится более сложное оборудование или использование других протоколов связи, например, Bluetooth Low Energy с поддержкой нескольких подключений, или протоколы Wi-Fi. При необходимости можно комбинировать несколько пар, но синхронизация и управление связью усложнится.
Как установить связь между двумя Bluetooth модулями Arduino для передачи данных?
Для организации обмена информацией между двумя Bluetooth модулями Arduino необходимо сначала настроить один из них в режим ведущего (Master), а другой — в режим ведомого (Slave). После подключения модулей к платам Arduino и загрузки соответствующего кода, ведущий модуль инициирует соединение с ведомым по Bluetooth. В коде обычно используются стандартные библиотеки для последовательной передачи данных (Serial), что позволяет отправлять и принимать сообщения. Важно правильно настроить скорость передачи и убедиться, что оба устройства работают на одинаковом уровне напряжения.
Какие трудности могут возникнуть при обмене данными между двумя Bluetooth модулями Arduino и как их решить?
Основные сложности связаны с установкой стабильного соединения и корректной передачей данных. Часто проблемы возникают из-за неправильной конфигурации ролей модулей, несовпадения скоростей передачи или помех в радиосигнале. Чтобы избежать сбоев, рекомендуется проверить настройки скорости (baud rate) на обоих устройствах, использовать проверенные библиотеки и соблюдать требования по питанию модулей. Также стоит убедиться, что расстояние между устройствами не превышает допустимый диапазон работы Bluetooth и что нет значительных препятствий между ними. В случае сбоев в передаче полезно добавить подтверждения получения сообщений в протокол обмена.