Колесико регулировки громкости используется в аудиоустройствах и компьютерной периферии для плавного изменения уровня звука. Чаще всего оно представляет собой энкодер – датчик углового положения, преобразующий механическое вращение в электрические импульсы. Такие импульсы считываются микроконтроллером и интерпретируются как команды увеличения или уменьшения громкости.
Наиболее распространён – инкрементальный энкодер с шаговым механизмом. При каждом щелчке происходит замыкание контактов внутри устройства, что позволяет точно определить направление и скорость вращения. В отличие от потенциометров, энкодеры не имеют фиксированного начала и конца диапазона, что делает их надёжным решением для циклического ввода значений.
Для устойчивой работы системы необходима фильтрация дребезга контактов. Это реализуется как аппаратно – с помощью RC-цепей, так и программно – с применением таймеров и логики подавления ложных срабатываний. Кроме того, важную роль играет правильная настройка чувствительности считывания: слишком высокая чувствительность может вызывать некорректную реакцию на быстрое вращение, а низкая – задержки в отклике.
В современных устройствах колесико может быть встроено в схему с дополнительными функциями: нажатием как кнопкой, подсветкой или даже тактильной отдачей. Однако базовый принцип остаётся прежним – считывание сигнала с вращающегося датчика и его интерпретация для управления цифровым аудиовыходом или аналоговым усилителем.
Какое устройство скрыто внутри колесика громкости
Под корпусом колесика регулировки громкости обычно находится энкодер – датчик, преобразующий механическое вращение в цифровой сигнал. Это устройство фиксирует направление и количество шагов вращения, отправляя данные на управляющий микроконтроллер. Наиболее распространённый тип – инкрементальный оптический или механический энкодер с шагом от 12 до 24 позиций на оборот.
Механические энкодеры работают за счёт контактов, замыкающихся при вращении оси. Они просты, недорогие, но подвержены износу и шумам в сигнале. Оптические энкодеры точнее, поскольку используют инфракрасный датчик и прорезинённый диск с прорезями, но требуют более сложной схемотехники и питаются от источника 3,3–5 В.
В некоторых моделях используется потенциометр – аналоговое устройство, изменяющее сопротивление при повороте. Он даёт непрерывный сигнал, но не подходит для цифровых интерфейсов и быстро изнашивается при частом использовании. Потенциометры чаще встречаются в аналоговой аппаратуре, тогда как энкодеры – в цифровых устройствах.
Дополнительно внутри может располагаться тактильная кнопка под осью, которая срабатывает при нажатии на колесо. Это расширяет функциональность, позволяя использовать колесико не только для регулировки громкости, но и для подтверждения выбора или выключения звука.
Проводка между энкодером и основной платой реализуется через гибкий шлейф или пайку проводов к контактной группе. Конструкция защищена от пыли и влаги с помощью пластикового кожуха или силиконовой мембраны, что увеличивает срок службы устройства.
Как колесо громкости преобразует вращение в электрический сигнал

Колесико громкости чаще всего соединено с энкодером – устройством, которое преобразует механическое вращение в последовательность электрических импульсов. В потребительской электронике широко применяются инкрементальные энкодеры, состоящие из диска с чередующимися прозрачными и непрозрачными участками, оптической пары (светодиода и фотоприёмника) и электронной схемы обработки сигнала.
При вращении диска через отверстия попеременно проходит свет, создавая серию импульсов. Частота и направление импульсов зависят от скорости и направления вращения колесика. Второй фотоприёмник, смещённый по фазе, позволяет определить, крутится ли колесо по часовой стрелке или против. Это обеспечивает пошаговое увеличение или уменьшение громкости в интерфейсе устройства.
В аналоговых регуляторах применяется потенциометр – переменный резистор с вращающимся контактом. При повороте колесика изменяется сопротивление, которое влияет на уровень проходящего сигнала или на управляющее напряжение. Этот метод отличается плавным аналоговым управлением без цифровых шагов, но требует более точной подстройки и со временем может терять точность из-за износа дорожек.
Цифровые энкодеры более надёжны в эксплуатации, не подвержены износу в той же степени, что и потенциометры, и обеспечивают стабильную работу даже при интенсивной эксплуатации. Они также позволяют реализовать дополнительные функции, такие как нажим на колесо или программируемую индикацию.
Роль энкодера в регулировке звука колесиком
Наиболее часто используется инкрементальный (или относительный) энкодер с двумя выходными каналами – A и B. Эти каналы формируют квадратурный сигнал, позволяющий определить не только факт вращения, но и его направление. Примерная частота переключений зависит от конструкции и точности самого энкодера – обычно от 12 до 24 шагов на оборот.
- Для микроконтроллеров энкодер подключается напрямую к цифровым входам с прерываниями;
- Программно реализуется обработка фронтов сигналов A и B;
- Для защиты от дребезга контактов часто применяют программную или аппаратную фильтрацию;
- Энкодеры могут быть оснащены нажимной кнопкой – она работает независимо от вращения и используется, например, для отключения звука.
Если энкодер подключён через интерфейс I²C или SPI (в более сложных схемах), точность и надёжность управления повышается, особенно при большой нагрузке на управляющий микроконтроллер.
При замене или проектировании схемы управления громкостью стоит учитывать ресурс механических энкодеров – он составляет от 30 000 до 100 000 циклов вращения. В аудиоустройствах среднего класса применяются энкодеры с оптическим принципом действия, обладающие более длительным сроком службы и высокой точностью.
Чем отличается аналоговое колесико от цифрового
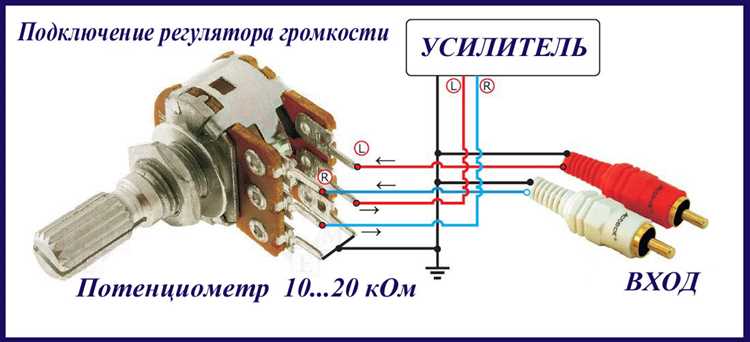
Аналоговое колесико регулировки громкости представляет собой переменный резистор (потенциометр), изменяющий сопротивление в зависимости от угла поворота. Такое решение напрямую влияет на амплитуду аудиосигнала, передаваемого на усилитель.
- Работает на основе изменения сопротивления – чем выше сопротивление, тем тише звук.
- Может вызывать шорохи при износе дорожек или окислении контактов.
- Регулировка происходит непрерывно, без дискретных шагов.
- Чаще встречается в аналоговой аудиотехнике (усилители, магнитофоны, старые радиоприёмники).
Цифровое колесико не изменяет аналоговый сигнал напрямую. Оно использует энкодер, формирующий серию импульсов при вращении. Эти сигналы передаются микроконтроллеру, который регулирует уровень громкости программно или через цифровой регистр.
- Передаёт управляющие сигналы, не влияя на аудиотракт напрямую.
- Имеет чёткие шаги регулировки (чаще всего 20–30 позиций на оборот).
- Позволяет реализовать дополнительный функционал, например, нажатие как кнопку.
- Применяется в цифровых устройствах: звуковых картах, ноутбуках, современных ресиверах.
Если важна точность и долговечность – предпочтительнее цифровое решение. В случаях, когда требуется максимально «тёплый» и непрерывный контроль сигнала, остаются востребованными аналоговые регуляторы. Выбор зависит от конкретной схемы устройства и требований к управлению громкостью.
Как обрабатывается сигнал от колесика на уровне схемы
При вращении колесика, связанного с энкодером, формируются два квадратурных сигнала – каналы A и B. Эти сигналы представляют собой прямоугольные импульсы, смещённые по фазе на 90 градусов. Сдвиг позволяет микроконтроллеру определить направление вращения и количество шагов.
Сигналы с энкодера подаются на входы микроконтроллера или специализированного интерфейсного чипа, например, через GPIO с прерываниями. Аппаратная часть схемы может включать подтягивающие резисторы к Vcc, чтобы сигналы были стабильными в состоянии покоя.
Обработка происходит через прерывания по фронту или спаду сигнала на одном или обоих каналах. При срабатывании прерывания микроконтроллер сравнивает состояния каналов A и B, чтобы определить шаг и направление вращения. Простейшая логика: если при изменении A сигнал B высокий – вращение вправо, если низкий – влево.
Для фильтрации дребезга контактов используется программная задержка (дебаунсинг) либо аппаратный RC-фильтр. В микроконтроллерах с встроенным аппаратным дешифратором энкодера (например, STM32 с таймером в режиме Encoder Interface) считывание происходит на аппаратном уровне, что исключает ложные срабатывания.
Далее, полученные импульсы преобразуются в цифровое значение, соответствующее текущему положению регулятора. Это значение передаётся в модуль управления громкостью, который либо управляет цифровым потенциометром (например, чипы серии DS1882), либо отправляет команды на аудиопроцессор по I2C или SPI для изменения уровня сигнала.
Почему колесико громкости может работать с перебоями

Основная причина сбоев в работе колесика громкости связана с износом контактных элементов потенциометра или энкодера. В потенциометрах со временем стирается углеродный слой или окисляются контактные дорожки, что приводит к прерывистому сигналу и «заиканиям» в регулировке.
В цифровых энкодерах перебои возникают из-за загрязнения или повреждения оптических или магнитных датчиков, которые фиксируют вращение. Пыль и грязь снижают точность считывания импульсов, вызывая неправильную интерпретацию поворота.
Некачественная пайка или микротрещины на плате могут приводить к периодическому размыканию цепи, особенно при вибрациях или движениях устройства. Это вызывает непостоянный контакт и нестабильность сигнала с колесика.
Сбой в программном обеспечении, обрабатывающем сигналы с колесика, может вызывать задержки или пропуски событий, особенно если драйверы устарели или конфликтуют с другими устройствами.
Рекомендуется регулярно чистить механизмы колесика с помощью изопропилового спирта и мягкой кисточки, а также проверять пайку на плате. При устойчивых перебоях целесообразно заменить потенциометр или энкодер на новый, учитывая совместимость по техническим параметрам.
Как работает колесо громкости в беспроводных устройствах

В беспроводных устройствах колесо громкости обычно интегрируется с цифровым энкодером или потенциометром, данные с которого преобразуются в цифровые сигналы. Эти сигналы передаются по беспроводному каналу (Bluetooth, Wi-Fi или другой протокол) к основному устройству или аудиопроцессору.
Основной компонент – встроенный микроконтроллер, который считывает изменения положения колеса и формирует соответствующий код управления громкостью. Для повышения точности используется кодирование с учётом направления вращения и скорости вращения, что минимизирует ложные срабатывания.
Передача данных по беспроводной сети происходит в пакетах с контрольной суммой для обеспечения целостности. Частота передачи оптимизируется для минимизации задержек и энергопотребления, особенно в портативных устройствах с ограниченным аккумулятором.
После приёма сигнала основной блок преобразует цифровое значение в регулировку уровня аудиовыхода. Часто используется программное управление усилением, что позволяет точнее и быстрее менять громкость без механических компонентов в цепи.
Рекомендуется периодическая калибровка колеса в прошивке для устранения дрейфа показаний и повышения стабильности работы. Кроме того, в программном обеспечении можно внедрять фильтрацию шумов с датчика и компенсацию случайных нажатий.
Вопрос-ответ:
Как именно вращение колесика громкости преобразуется в изменение звука?
Колесико громкости связано с регулирующим элементом, чаще всего потенциометром или цифровым энкодером. При вращении меняется электрическое сопротивление или формируется цифровой сигнал, который передаётся на усилитель. Усилитель, в зависимости от величины этого сигнала, увеличивает или уменьшает амплитуду аудиосигнала, что и воспринимается как изменение громкости.
В чем разница между аналоговым и цифровым колесиком громкости на уровне работы?
Аналоговое колесико громкости обычно основано на потенциометре, который изменяет сопротивление напрямую, формируя непрерывный аналоговый сигнал. Цифровое колесико использует энкодер, который преобразует вращение в цифровые импульсы. Эти импульсы обрабатываются микроконтроллером, который регулирует уровень громкости программно, часто с помощью цифро-аналогового преобразователя или цифрового усилителя.
Почему иногда колесико громкости может работать с перебоями или «прыгать»?
Причины перебоев могут быть механическими и электрическими. Механически — износ контактов потенциометра, загрязнение или повреждение поверхности. Электрически — помехи в цепи, плохой контакт или неисправность в считывающей электронике. В цифровых моделях ошибки возникают из-за сбоя сигналов энкодера или программных сбоев в обработке импульсов.
Какие виды датчиков используются в колесиках громкости и как они влияют на точность регулировки?
Чаще всего применяются резистивные потенциометры и оптические или магнитные энкодеры. Потенциометры дают плавное изменение сигнала, но подвержены износу и загрязнению. Оптические энкодеры обеспечивают высокую точность и долговечность, фиксируя поворот с помощью световых лучей и фотодетекторов. Магнитные энкодеры используют эффект Холла, устойчивы к пыли и износу, что повышает стабильность работы и точность регулировки.
Как обрабатывается сигнал от колесика на уровне электронной схемы?
В аналоговых системах сигнал с потенциометра подаётся напрямую на вход усилителя или микроконтроллера, который изменяет уровень звука. В цифровых системах энкодер генерирует последовательность импульсов, которые микроконтроллер интерпретирует как команды увеличить или уменьшить громкость. Далее микроконтроллер управляет цифро-аналоговым преобразователем или цифровым усилителем, изменяя выходной уровень аудиосигнала.