Для создания управляемого робота на базе Arduino потребуется выбрать подходящую модель платы – например, Arduino Uno или Arduino Nano для компактных проектов. В качестве контроллера можно использовать оригинальную плату или её совместимый аналог, но важно учитывать объём памяти, количество цифровых и аналоговых пинов, а также поддержку необходимой частоты работы.
Перед началом программирования устанавливается Arduino IDE или альтернативная среда, например PlatformIO. В IDE необходимо выбрать модель платы и порт подключения, после чего можно загружать скетчи. Для взаимодействия с моторами, сервоприводами и датчиками применяются готовые библиотеки – Servo.h для сервоприводов, AFMotor.h для мотор-шилдов, NewPing.h для ультразвуковых датчиков расстояния. Это сокращает время разработки и снижает риск ошибок в коде.
Тестирование лучше проводить поэтапно: сначала проверка отклика отдельных датчиков, затем работа приводов, и только после этого – интеграция в единый алгоритм. При возникновении ошибок используется последовательный монитор в Arduino IDE, что позволяет отслеживать значения переменных в реальном времени и корректировать код без замены аппаратных компонентов.
Выбор подходящей модели Arduino для робота

Для компактных роботов, где важна экономия пространства и энергии, часто применяют Arduino Nano. Эта плата имеет 22 входа-выхода, питание от 5 В, а её размеры позволяют разместить её в небольших корпусах. Подходит для проектов с ограниченным количеством датчиков и простыми алгоритмами управления.
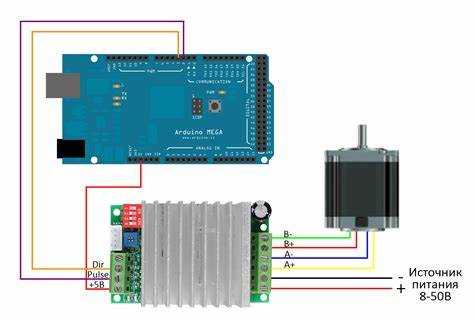
Для роботов с большим количеством исполнительных механизмов и датчиков предпочтительнее Arduino Mega 2560. Она оснащена 54 цифровыми входами-выходами, 16 аналоговыми входами и расширенной памятью, что позволяет использовать сложные программы и обрабатывать больше данных одновременно.
Если требуется беспроводное управление или обмен данными по Wi-Fi, удобным вариантом станет плата на базе ESP32 или Arduino Uno WiFi Rev2. Встроенный модуль связи избавляет от необходимости подключать отдельные адаптеры, что упрощает схему и уменьшает массу робота.
Для автономных моделей, работающих от аккумулятора, стоит учитывать энергопотребление. Платы на базе микроконтроллеров с низким энергопотреблением, например Arduino Pro Mini, позволяют увеличить время работы без подзарядки, особенно при использовании режимов сна.
Выбор модели нужно связывать с количеством необходимых портов, объёмом памяти, требованиями к скорости обработки данных и условиями эксплуатации робота.
Подключение датчиков движения и расстояния
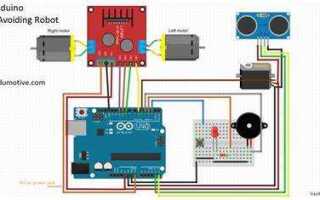
Для обнаружения препятствий и определения расстояния до объектов в роботах на Arduino часто применяют ультразвуковые модули HC-SR04 и инфракрасные датчики движения типа HC-SR501. Подключение выполняется к цифровым пинам платы, что позволяет считывать сигналы напрямую через Arduino IDE.
Ультразвуковой HC-SR04 имеет четыре контакта: VCC, GND, Trig и Echo. Trig подключается к любому свободному цифровому выходу, Echo – к цифровому входу. Питание подается от 5V Arduino, заземление объединяется с GND. При подключении проводов длиной более 30 см желательно использовать экранированный кабель для снижения помех.
- Использовать отдельную шину питания для нескольких датчиков, чтобы избежать падения напряжения при одновременном срабатывании.
- Размещать HC-SR04 на высоте, исключающей попадание в зону измерений колёс и шасси.
- Направлять HC-SR501 так, чтобы его зона обзора не пересекалась с движущимися частями робота.
- В коде предусмотреть фильтрацию ложных срабатываний с помощью усреднения нескольких измерений.
Для проверки работы подключённых модулей в Arduino IDE можно использовать примерные скетчи из раздела File → Examples, изменив номера пинов под свою схему. После успешного теста интегрируйте обработку сигналов датчиков в основной код управления роботом.
Написание кода для управления моторами
Для управления моторами через Arduino чаще всего используют драйверы, например L298N или TB6612FNG. Подключение осуществляется через цифровые пины, а для регулировки скорости применяется функция analogWrite(), подающая ШИМ-сигнал.
В начале программы объявляются константы с номерами пинов для каждого канала драйвера. Например, const int ENA = 9; отвечает за скорость первого мотора, а const int IN1 = 8; и const int IN2 = 7; – за направление вращения. Такой подход упрощает изменение схемы без переписывания всей программы.
В функции setup() устанавливаются режимы пинов через pinMode(). Далее в цикле loop() задаётся направление вращения комбинацией сигналов HIGH и LOW на управляющих пинах. Для плавного старта или торможения меняется значение ШИМ в диапазоне от 0 до 255.
Пример включения мотора вперёд на половине мощности:
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); analogWrite(ENA, 128);
Для обратного хода сигналы на IN1 и IN2 меняются местами. Перед полной остановкой лучше плавно снижать скорость, чтобы снизить нагрузку на механические части.
Если требуется синхронизировать работу двух моторов, полезно выносить команды управления в отдельные функции. Это повышает читаемость кода и облегчает добавление новых режимов движения, например, поворота на месте или движения по дуге.
Настройка алгоритма обхода препятствий

Для реализации обхода препятствий робот должен получать данные от датчиков расстояния и корректировать траекторию движения в реальном времени. Чаще всего применяют ультразвуковые или инфракрасные датчики, подключенные к аналоговым или цифровым входам Arduino.
Последовательность настройки:
- Определить минимальное допустимое расстояние до объекта, при котором робот будет менять направление, например 15–20 см.
- Считать данные с датчика с помощью функции
pulseIn()для ультразвуковых модулей илиanalogRead()для ИК-сенсоров. - Сравнить полученное значение с установленным порогом.
- При превышении порога продолжать движение прямо, при меньшем значении – активировать алгоритм обхода.
Пример структуры алгоритма:
- Робот движется прямо, пока расстояние до объекта больше порогового.
- При обнаружении препятствия моторы останавливаются.
- Выполняется поворот в сторону, где датчики показывают большее свободное пространство.
- После поворота робот возобновляет движение вперед.
Для повышения стабильности следует добавить задержку в несколько миллисекунд между измерениями, чтобы исключить ложные срабатывания. Также полезно использовать усреднение данных за несколько циклов опроса датчиков.
Загрузка программы на плату Arduino
Для загрузки скетча подключите плату к компьютеру с помощью USB-кабеля, подходящего для вашей модели (например, USB-B для Arduino Uno или micro-USB/USB-C для других версий). Убедитесь, что кабель поддерживает передачу данных, а не только зарядку.
Откройте Arduino IDE и в меню Инструменты → Плата выберите точную модель устройства. В разделе Порт укажите COM-порт, к которому подключена плата. На Windows он отображается как «COMX», на macOS и Linux – как «/dev/tty…».
Перед загрузкой убедитесь, что в коде нет синтаксических ошибок, выполнив компиляцию через кнопку Проверить. После успешной проверки нажмите Загрузить. Индикатор передачи данных на плате должен мигать, а внизу окна IDE появится сообщение «Загрузка завершена».
Если загрузка не проходит, проверьте правильность выбранного порта и платы, установку драйверов (например, CH340 для некоторых совместимых моделей) и целостность USB-кабеля. Для устранения зависаний иногда помогает перезагрузка платы кнопкой RESET.
Отладка и тестирование работы робота
Начинайте тестирование с отдельных модулей: проверьте корректность считывания данных с датчиков, работу двигателей и реагирование на команды по отдельности. Это позволит локализовать ошибку до интеграции всех систем.
Используйте пошаговое выполнение кода с добавлением задержек между ключевыми операциями для наблюдения реакции робота в реальном времени и выявления сбоев в логике управления.
Для проверки работы моторов применяйте тестовые команды с разными значениями скорости и направлений, фиксируя параметры тока и напряжения, чтобы исключить аппаратные неисправности.
Автоматизируйте тесты при помощи циклов с изменением входных данных и проверкой отклика, что позволяет убедиться в стабильности алгоритма на разных сценариях.
Обязательно контролируйте уровень питания, нестабильное напряжение влияет на непредсказуемое поведение и сбои в работе периферии.
По итогам тестирования фиксируйте результаты и вносите изменения в код, избегая избыточных изменений, чтобы проще отслеживать влияние исправлений.
Вопрос-ответ:
Как подключить датчики к плате Arduino для управления роботом?
Для подключения датчиков к Arduino сначала нужно определить тип сигнала датчика — аналоговый или цифровой. Аналоговые датчики подключаются к аналоговым входам (A0–A5), цифровые — к цифровым пинам (0–13). Важно правильно подключить питание и землю датчика. После этого в коде необходимо использовать функции чтения: analogRead() для аналоговых и digitalRead() для цифровых сигналов. Также рекомендуется проверять документацию на конкретный датчик, чтобы убедиться в правильности подключения и настроек.
Какие ошибки чаще всего возникают при программировании робота на Arduino и как их исправить?
Частые ошибки связаны с неправильным подключением компонентов, неверным выбором пинов или неправильной логикой в коде. Например, если мотор не работает, стоит проверить питание, состояние пинов и соответствие их назначению в коде. Еще одна распространённая проблема — ошибки компиляции из-за опечаток или отсутствующих библиотек. Для исправления нужно внимательно сверить схему с программой, использовать последовательную печать (Serial.print) для отладки, а также убедиться, что все нужные библиотеки подключены и обновлены.
Как реализовать простое управление двигателями робота с помощью Arduino?
Для базового управления двигателями понадобятся моторы, драйверы моторов (например, L298N) и подключение к Arduino. В коде используют цифровые пины для управления направлением вращения и широтно-импульсную модуляцию (PWM) для регулировки скорости. Например, установка пина в HIGH может включать вращение в одну сторону, LOW — в другую. Функция analogWrite() позволяет задать скорость от 0 до 255. Важно соблюдать последовательность подключения и избегать перегрузок по току, чтобы защитить плату и моторы.
Как проверить работоспособность программы на Arduino перед установкой в робота?
Перед монтажом программы в робота следует протестировать каждую функцию отдельно. Для этого подключите Arduino к компьютеру и используйте встроенный монитор порта (Serial Monitor) для вывода данных и отладки. Проверяйте работу сенсоров, двигателей и других компонентов по очереди. Если что-то не работает, можно добавить выводы состояния через Serial.print(), чтобы понять, на каком этапе возникает проблема. Также полезно создавать минимальные тестовые скетчи, которые выполняют одну задачу, чтобы убедиться, что аппарат и программа работают корректно.