

Попытки объединить генератор и электродвигатель в единый замкнутый цикл основываются на идее, что энергия, вырабатываемая генератором, способна полностью обеспечить работу электродвигателя, который в свою очередь вращает ротор генератора. На практике этот подход неизбежно сталкивается с потерями, связанными с трением подшипников, нагревом обмоток, сопротивлением проводников и вихревыми токами в магнитопроводе. Даже при использовании современных материалов с низким коэффициентом потерь КПД такой системы не превышает 90–98%, что исключает возможность непрерывной работы без внешнего источника энергии.

Ключевым параметром в подобных конструкциях является баланс между моментом, создаваемым электродвигателем, и механическим сопротивлением генератора. Для минимизации потерь применяются редкоземельные магниты с высокой остаточной индукцией, прецизионные подшипники с минимальным трением, а также проводники с увеличенным сечением для снижения омических потерь. Однако даже при идеальной оптимизации каждая стадия преобразования энергии сопровождается неизбежным снижением её количества.
Для исследования концепции рекомендуется проводить расчёт энергетического баланса с учётом всех видов потерь, включая паразитные электромагнитные колебания и шумовые эффекты. Практическая проверка требует использования датчиков крутящего момента, осциллографа для анализа формы сигнала и термодатчиков для отслеживания тепловых потерь. Только детальный экспериментальный анализ позволяет оценить, насколько близко система может подойти к теоретическому пределу эффективности, и выявить факторы, делающие невозможным реализацию вечного двигателя на основе связки генератора и электродвигателя.
Выбор подходящей пары генератор–электродвигатель для замкнутой системы

Для минимизации потерь в замкнутой системе критично подбирать генератор и электродвигатель с максимально близкими номинальными напряжениями и скоростями вращения. Несовпадение этих параметров приводит к дополнительным потерям в преобразователях и нагреву обмоток.
Оптимальный диапазон КПД генераторов переменного тока промышленного исполнения – 85–94 %, у высокоэффективных двигателей класса IE3–IE4 – 88–96 %. Следует стремиться к паре, где суммарный КПД системы при номинальной нагрузке не опускается ниже 80 %.
Для систем, рассчитанных на стабильную скорость, предпочтительны синхронные машины с постоянными магнитами, обеспечивающие стабильное напряжение при изменениях нагрузки. В случае переменной нагрузки рациональнее использовать асинхронный двигатель с частотным преобразователем, а генератор – с независимым возбуждением для регулировки выходного напряжения.
Перед окончательным выбором необходимо провести расчёт электрического и механического согласования: момент двигателя при номинальной скорости должен быть не меньше расчётного сопротивления вращению генератора плюс потери на трение и вентиляцию. Несоблюдение этого условия приводит к недозагрузке или перегрузке компонентов и ускоренному износу.
Расчёт баланса мощности и потерь в замкнутом контуре

Для оценки работоспособности системы «генератор–электродвигатель» необходимо вычислить полный энергетический баланс с учётом всех видов потерь. Расчёт ведут по формуле:
Pген – Pдвиг – ΣPпотерь = ΔP, где ΔP должно быть равно нулю при идеальной передаче энергии.
- Мощность генератора: Pген = Uг · Iг · ηг, где ηг – КПД генератора.
- Мощность электродвигателя: Pдвиг = Uд · Iд · ηд.
- Потери в проводниках: PR = I² · R (определяются по суммарному сопротивлению цепи).
- Механические потери: трение в подшипниках, сопротивление воздуха – оцениваются по крутящему моменту без нагрузки.
- Магнитные потери: гистерезис и вихревые токи в сердечниках – зависят от частоты вращения и качества стали.
Для реального контура необходимо, чтобы:
- КПД генератора и двигателя превышал 0,9 каждый.
- Суммарные электрические потери были меньше 5% от Pген.
- Механические потери не превышали 2% от номинальной мощности двигателя.
- Тепловой режим обеспечивал стабильность η в течение длительной работы.
Если сумма потерь превышает 10–12% от вырабатываемой мощности, замкнутый контур теряет способность к самоподдержанию и быстро останавливается.
Методы уменьшения механического и электрического сопротивления

Для снижения механических потерь в генераторах и электродвигателях минимизируют трение в подшипниках, используя керамические или магнитные опоры с коэффициентом трения ниже 0,001. Регулярная балансировка ротора уменьшает вибрацию и нагрузку на опоры. Лопасти или вентиляторы для охлаждения проектируют с оптимизированным профилем, уменьшающим аэродинамическое сопротивление при сохранении необходимого потока воздуха.
Электрические потери сокращают применением проводников с повышенной проводимостью – меди с чистотой 99,99 % или алюминия с поверхностным серебрением. Увеличение сечения обмоток снижает омическое сопротивление, а скрутка проводов по технологии Litz уменьшает вихревые токи на высоких частотах. Ламинированные сердечники из электротехнической стали толщиной 0,27–0,35 мм снижают потери на перемагничивание. Контакты выполняют с минимальным переходным сопротивлением, применяя гальваническое покрытие золотом или оловом и обеспечивая стабильное контактное давление.
Дополнительное уменьшение сопротивления достигается за счет точного выравнивания воздушного зазора между ротором и статором до 0,1–0,3 мм, а также применения активного охлаждения, предотвращающего рост температуры обмоток и увеличение их сопротивления.
Использование накопителей энергии для стабилизации работы системы
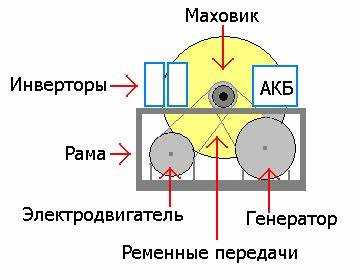
В системах с генератором и электродвигателем применение накопителей энергии позволяет сглаживать колебания мощности, компенсировать пусковые токи и предотвращать падение напряжения при кратковременных перегрузках. Наиболее эффективны литий-ионные аккумуляторы, суперконденсаторы и гибридные модули, обеспечивающие высокую плотность энергии и быструю отдачу мощности.
Выбор емкости и типа накопителя зависит от длительности переходных процессов и допустимых колебаний выходных параметров. При расчете необходимо учитывать номинальную мощность генератора, КПД электродвигателя и частоту циклов заряда/разряда. Применение блока управления с алгоритмом балансировки заряда позволяет продлить срок службы накопителя и снизить тепловые потери.
| Тип накопителя | Энергетическая плотность (Вт·ч/кг) | Время отклика | Срок службы (циклы) | Особенности применения |
|---|---|---|---|---|
| Литий-ионный аккумулятор | 150–250 | 10–100 мс | 2000–5000 | Оптимален для продолжительных нагрузок средней мощности |
| Суперконденсатор | 5–10 | <1 мс | 500000+ | Эффективен для компенсации пиков тока и резких колебаний мощности |
| Гибридный модуль | 50–100 | 1–10 мс | 10000–20000 | Сочетает высокую отдачу тока и приемлемую емкость |
При интеграции накопителей в систему рекомендуется предусмотреть резерв по емкости не менее 20% от расчетной, а также защиту от переразряда и перегрева. Это минимизирует риски выхода из строя оборудования при непредвиденных нагрузках.
Влияние магнитных полей на производительность установки

Интенсивность внешнего магнитного поля напрямую определяет крутящий момент электродвигателя и отдачу генератора. При превышении индукции 1,2 Тл в рабочем зазоре возрастает насыщение сердечников, что снижает КПД до 15% из-за потерь на вихревые токи.
Неоднородность магнитного поля вызывает асимметрию нагрузки на обмотки, повышая нагрев до 20–25 °C сверх номинала и ускоряя деградацию изоляции. Для стабилизации параметров требуется использовать ферромагнитные экраны толщиной не менее 2 мм и шунтирующие пластины из пермаллоя с проницаемостью выше 50 000.
При расположении генератора и двигателя в едином корпусе необходимо соблюдать межосевое расстояние не менее 0,4 м либо вводить компенсирующие катушки, питаемые от отдельного источника с током до 5% от номинального, что позволяет снизить паразитное взаимодействие до 70%.
Точная настройка магнитных зазоров и контроль распределения потоков через датчики Холла с разрешением не хуже 0,1 мТл обеспечивают рост производительности установки до 12% при неизменной потребляемой мощности.
Контроль нагрева и износа узлов в длительном режиме работы

Износ подшипников следует контролировать по уровню вибраций: превышение 4,5 мм/с (по ISO 10816) сигнализирует о начале разрушения дорожек качения. Для анализа предпочтительно использовать вибродатчики с частотным диапазоном до 10 кГц, что позволяет выявлять зарождающиеся дефекты на ранней стадии.
В системах с высокой нагрузкой необходима постоянная подача смазки с контролем её температуры и вязкости. Для роликовых подшипников критическим считается падение вязкости более чем на 20 % от номинала, что требует замены смазки или корректировки её типа.
Для предотвращения локального перегрева коллекторных узлов применяют бесконтактный инфракрасный контроль, фиксирующий рост температуры более чем на 15 °C относительно средней по ротору. Это указывает на плохой контакт щёток или загрязнение коллектора.
Вопрос-ответ:
Можно ли заставить генератор и электродвигатель работать так, чтобы они питали друг друга бесконечно?
Нет. Даже если соединить генератор и электродвигатель так, чтобы двигатель вращал генератор, а генератор питал двигатель, неизбежны потери энергии на трение, нагрев обмоток и сопротивление проводников. Эти потери постепенно замедлят систему, и она остановится без внешнего источника питания.
Почему генератор и электродвигатель не могут образовать вечный двигатель первого рода?
Вечный двигатель первого рода предполагает создание энергии «из ничего». Это противоречит закону сохранения энергии: в любой реальной установке всегда есть механические и электрические потери. Даже при идеальной настройке вращение будет замедляться, так как КПД генератора и электродвигателя всегда меньше 100 %.
Что произойдет, если использовать очень мощный электродвигатель и такой же генератор?
Система проработает дольше по сравнению с маломощными устройствами за счёт большего запаса энергии в маховике и массивных деталях. Но потери всё равно останутся, и без внешней подпитки вращение прекратится.
Можно ли компенсировать потери с помощью аккумулятора и всё-таки сделать установку «бесконечной»?
Аккумулятор лишь отсрочит остановку, питая двигатель в моменты, когда генератор выдаёт недостаточную мощность. Однако он сам потребует зарядки, а значит, система перестанет быть автономной. Это уже будет обычный замкнутый энергокомплекс с расходом энергии, а не вечный двигатель.
Почему в опытах с генератором и электродвигателем иногда кажется, что установка работает сама по себе?
Часто используется скрытый источник питания или предварительно раскрученный маховик, который может вращать систему заметное время. Наблюдателю может показаться, что она питается сама, но на самом деле это просто инерция или подача энергии извне.







