

Для того чтобы успешно подключить моторчик к плате Ардуино, важно учитывать несколько ключевых аспектов. Во-первых, тип моторчика, который вы собираетесь использовать, имеет прямое влияние на схему подключения и выбор компонентов. В данном руководстве мы рассмотрим процесс подключения как простых DC моторчиков, так и шаговых, с основными рекомендациями по выбору дополнительных компонентов, таких как драйверы и резисторы.
При подключении DC моторчика необходимо использовать транзистор или драйвер, чтобы избежать перегрузки пинов Ардуино. Пины микроконтроллера способны обеспечить только небольшое количество тока, которого недостаточно для работы большинства моторчиков. Важным моментом будет правильный выбор резисторов для защиты схемы от возможных коротких замыканий.
Следующий момент – это выбор подходящего источника питания. Моторчики, в отличие от самой платы Ардуино, обычно требуют отдельного источника питания. При этом важно учитывать напряжение и ток, необходимый для работы мотора. Например, для стандартного 5V моторчика потребуется источник с таким же напряжением, однако текущий ток может варьироваться в зависимости от модели.
Для управления мотором с помощью Ардуино используется программный код, который будет задавать направление вращения и скорость мотора. В этом разделе мы рассмотрим основные функции, необходимые для написания такого кода, а также советы по оптимизации работы системы в целом.
Выбор типа моторчика для проекта с Ардуино
При выборе моторчика для проекта с Ардуино важно учитывать несколько факторов: тип нагрузки, требуемая точность и мощность, а также стоимость. Рассмотрим основные виды моторчиков, которые могут подойти для различных задач.
Серводвигатели хорошо подходят для проектов, где необходима точность углового поворота. Эти моторчики управляются сигналами широтно-импульсной модуляции (ШИМ) и могут поворачиваться на заданные углы, что делает их идеальными для робототехники или панелей управления. Однако их использование ограничено углом поворота (обычно до 180°), и они не подходят для постоянного вращения.
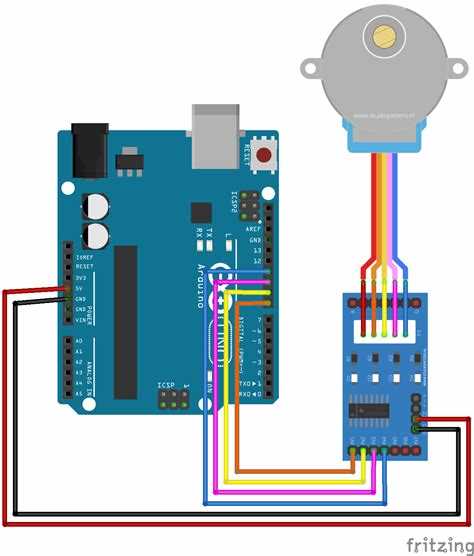
Шаговые двигатели обеспечивают точное управление углом и расстоянием. Их можно использовать для создания движущихся частей с точной позицией, например, в 3D-принтерах или CNC станках. Шаговые моторы имеют несколько проводов для управления шагами и требуют драйвера для работы с Ардуино. Главное их преимущество – возможность управлять позицией без датчиков обратной связи.
Бесщеточные двигатели (BLDC) эффективны и долговечны, их используют в проектах, где важна высокая скорость и малые размеры. Они требуют контроллеров скорости для работы с Ардуино и могут работать при большем токе, чем обычные щеточные двигатели. Они идеально подходят для моделей самолетов, дронов и других быстро движущихся объектов.
Щеточные двигатели часто используются для простых проектов, таких как роботы, игрушки или системы управления вентиляцией. Они не требуют сложных драйверов и легко подключаются к Ардуино через транзистор или мостовое соединение. Однако они изнашиваются быстрее и требуют регулярной замены щеток.
Выбирая моторчик, необходимо также учитывать напряжение и ток, которые поддерживает ваш проект. Для этого важно знать требования к питанию и вычислить мощность, необходимую для работы устройства. Например, для работы с двигателями мощностью более 1 Вт может потребоваться внешний источник питания, отличающийся от питания самой платы Ардуино.
Подключение моторчика к плате Ардуино: необходимые пины
Для подключения моторчика к плате Ардуино необходимо использовать несколько пинов, в зависимости от типа моторчика и схемы подключения. Если речь идет о стандартном DC моторе, потребуется подключить два пина: один для подачи питания, второй для управления его вращением.
Для управления мотором можно использовать пины, поддерживающие ШИМ (широтно-импульсную модуляцию). На большинстве плат Ардуино это пины с маркировкой PWM (например, 3, 5, 6, 9, 10, 11). Эти пины позволяют изменять скорость вращения моторчика с помощью изменения соотношения импульсов на выходе.
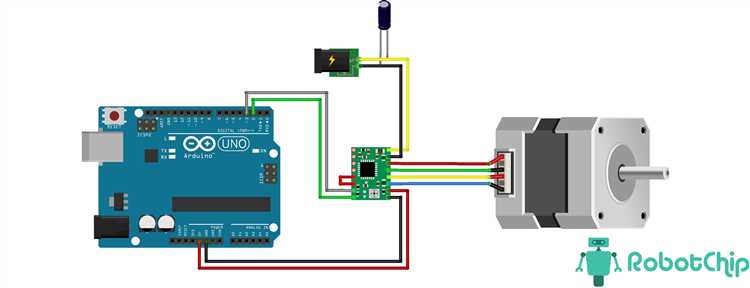
Если подключается шаговый мотор, вам потребуется использовать 4 пина для управления каждым из его катушек. В таком случае, для простоты управления, можно использовать драйверы, такие как L298N или A4988, которые подключаются к пинам цифровых выходов Ардуино.
При использовании реле для управления мотором, подключите вход реле к цифровому пину, который будет активировать реле для подачи питания на мотор. Реле можно подключить, например, к пину 7, 8 или любому доступному пину на плате Ардуино.
Для питания мотора используется отдельный источник питания, который должен быть подключен к плате через соответствующие пины питания (например, VIN или GND), в зависимости от требований к напряжению и току.
Подключение драйвера мотора для управления питанием
Для подключения мотора к плате Ардуино с использованием драйвера мотора, важно правильно организовать схему питания. Драйвер мотора позволяет контролировать подачу тока на мотор, предотвращая перегрузку и повреждение компонентов.
Прежде всего, выберите драйвер, подходящий для вашего типа мотора. Для постоянного тока обычно используются драйверы типа L298N или L293D. Эти модели обеспечивают стабильную работу и позволяют управлять мотором через сигнал с Ардуино.
Подключите управляющие пины драйвера к выходам цифровых пинов Ардуино. Для работы с двигателем потребуется два пина для управления направлением вращения и один пин для управления скоростью, чаще всего с помощью ШИМ (широтно-импульсной модуляции). Например, пины IN1 и IN2 можно подключить к пинам 5 и 6 на Ардуино, а пин EN (Enable) подключить к пину, поддерживающему ШИМ, например, к пину 9.
Для контроля скорости мотора, подключите пин EN к пину Ардуино с поддержкой ШИМ, например, 9, и используйте функцию analogWrite для изменения ширины импульса. Чем выше значение ШИМ, тем быстрее будет вращаться мотор.
Не забудьте подключить общий провод (GND) Ардуино и драйвера мотора к общему источнику питания, чтобы обеспечить корректную работу схемы.
После подключения драйвера, можно приступать к программированию Ардуино. С помощью простых команд для управления пинами IN1, IN2 и EN можно легко настроить вращение мотора в разных направлениях и с разной скоростью.
Настройка и проверка кода для управления мотором
1. Убедитесь, что мотор подключен к нужным пинам на плате. Например, если мотор подключен через драйвер к пинам 9 и 10, используйте их в коде.
2. Включите необходимые библиотеки. Для большинства моторов стандартных библиотек достаточно. Однако если вы используете специфичные драйверы, может понадобиться подключение дополнительных библиотек.
3. Настройте пины в коде. В функции setup() установите пины для управления мотором как выходные. Например, для пинов 9 и 10 это будет выглядеть так:
void setup() {
pinMode(9, OUTPUT); // Пин для управления направлением
pinMode(10, OUTPUT); // Пин для управления скоростью
}
4. В функции loop() настройте логику включения мотора. Для этого используйте цифровые значения для управления состоянием пинов, которые подключены к драйверу. Пример для простого включения мотора:
void loop() {
digitalWrite(9, HIGH); // Включение мотора
digitalWrite(10, HIGH); // Максимальная скорость
delay(1000); // Мотор работает 1 секунду
digitalWrite(9, LOW); // Отключение мотора
delay(1000); // Мотор не работает 1 секунду
}
5. Проверка работы кода. Подключите плату Ардуино к компьютеру и загрузите код в плату с помощью Arduino IDE. После загрузки наблюдайте за работой мотора. Если мотор не работает должным образом, проверьте правильность подключения и настройку пинов.
6. Тестирование. Протестируйте различные значения для управления скоростью и направлением мотора, чтобы убедиться в корректной работе программы. Можете изменить задержки или добавить дополнительные функции для управления мотором, например, с помощью аналоговых сигналов для регулирования скорости.
В случае необходимости обратитесь к документации используемого драйвера мотора для получения подробных инструкций по настройке.
Использование внешнего источника питания для моторчика
При работе с моторчиками на Arduino важно учитывать, что не все моторы могут быть питаны напрямую от платы, особенно если требуется высокое напряжение или ток. В таких случаях необходимо использовать внешний источник питания для мотора.
Для этого нужно следовать нескольким основным шагам:
- Определите параметры питания моторчика: напряжение и ток. Они должны соответствовать характеристикам вашего мотора. Например, если мотор работает от 12 В, подключение его напрямую к 5 В на Arduino приведет к неисправности.
- Подключите внешний источник питания. Используйте источник, соответствующий мощности мотора. Для моторов с рабочим напряжением 12 В можно использовать 12 В адаптер или батарею.
- Соедините землю внешнего источника питания с землей Arduino. Это важно для корректной работы системы, так как земля Arduino и моторного драйвера должны быть на одном уровне.
- Используйте драйвер мотора для управления питанием. Например, L298N или L293D. Эти компоненты позволяют безопасно управлять подачей питания на мотор и защищают Arduino от перегрузок.
Таким образом, использование внешнего источника питания обеспечивает стабильную работу моторчика и предотвращает перегрузки платы Arduino. Правильный выбор источника питания и соблюдение всех подключений гарантируют надежную работу проекта.
Тестирование работы моторчика после подключения

После того как моторчик был подключен к плате Ардуино, важно выполнить тестирование, чтобы убедиться, что все компоненты работают корректно. Для начала, проверьте все соединения. Убедитесь, что провода подключены к правильным пинам на плате Ардуино и к моторчику, а также, что питание поступает на нужные контакты.
Следующим шагом загрузите в плату тестовый скетч. Простой код для проверки работы мотора может выглядеть так:
void setup() {
pinMode(9, OUTPUT); // Настроить пин для управления мотором
}
void loop() {
digitalWrite(9, HIGH); // Включить мотор
delay(1000); // Работать 1 секунду
digitalWrite(9, LOW); // Выключить мотор
delay(1000); // Ожидание 1 секунду
}
После загрузки кода, наблюдайте за мотором. Он должен включаться и выключаться каждую секунду. Если мотор не запускается или работает неправильно, проверьте следующие моменты:
- Проверьте, что в коде правильно указан пин, к которому подключен мотор.
- Убедитесь, что напряжение питания мотора соответствует его требованиям.
- Проверьте, не перегревается ли драйвер мотора.
Если мотор не реагирует на команды, также проверьте, работает ли ваш драйвер мотора. Для этого можно замерить напряжение на пинах управления и на выходах драйвера с помощью мультиметра. Напряжение должно изменяться в зависимости от того, подается ли сигнал на пин.
Если мотор не включается, проверьте его на другом источнике питания, чтобы исключить возможность неисправности самого моторчика.
Вопрос-ответ:
Как правильно подключить моторчик к плате Ардуино?
Для подключения моторчика к плате Ардуино необходимо использовать подходящие пины для управления мотором, а также подключить его к соответствующим контактам питания. Обычно для этого используются пины 5V и GND для питания, а также пины для цифровых сигналов, чтобы управлять вращением мотора. Подключение следует осуществить через драйвер мотора, если мотор требует дополнительного питания.
Нужно ли использовать дополнительный источник питания для моторчика, подключаемого к Ардуино?
Да, для некоторых типов моторчиков, особенно тех, которые требуют большого тока, обязательно нужно использовать внешний источник питания. Плата Ардуино может не обеспечить достаточную мощность для моторчика, что может привести к перегрузке. Внешний источник питания подключается к мотору через драйвер, который контролирует подачу тока.
Какие драйверы моторов подходят для работы с Ардуино?
Для работы с моторчиками на Ардуино обычно используются драйверы L298N, L293D или MOSFET-модули. Эти драйверы позволяют контролировать подачу тока на мотор и обеспечивают защиту от перегрузок. Выбор драйвера зависит от типа мотора, его напряжения и требуемого тока.
Как настроить код для управления мотором через Ардуино?
Для управления мотором на Ардуино нужно использовать библиотеку, которая позволяет работать с драйверами моторов. Например, для L298N можно использовать библиотеку `AFMotor`. В коде необходимо задать пины, к которым подключены моторы, а также создать функции для их включения и выключения, а также изменения скорости вращения с помощью ШИМ-сигнала.
Почему мотор может не вращаться после подключения к Ардуино?
Есть несколько возможных причин. Во-первых, стоит проверить правильность подключения всех проводов, особенно пинов для питания и сигнала. Во-вторых, возможно, мотор требует большего тока, чем может обеспечить плата Ардуино, и в таком случае нужно использовать внешний источник питания. Также стоит убедиться в корректности кода, чтобы сигналы управления двигались по правильным пинам.
Как подключить моторчик к Ардуино и какие пины для этого нужны?
Для подключения моторчика к Ардуино необходимо использовать пины, которые могут подавать сигнал на мотор. Обычно для этого используются цифровые пины. Важно понимать, что для управления мотором потребуется драйвер, так как сам Ардуино не может напрямую подавать достаточное количество тока. К примеру, для подключений к мотору типа DC можно использовать пины 9, 10, или 11, в зависимости от модели и настроек программы. Подключив один провод к пину, а второй — к земле, можно проверить работу схемы. Для двигателей с постоянным током или шаговых моторов могут потребоваться дополнительные компоненты, такие как транзисторы или специализированные драйверы.







