Include servo h – это специализированный заголовочный файл в языке программирования C/C++, используемый для работы с сервомоторами. Этот файл обычно включается в проект, чтобы предоставить разработчику функции и определения, необходимые для управления сервоприводами. Он является частью стандартных библиотек для работы с периферийными устройствами, такими как сервомоторы, встраиваемые в различные системы, включая робототехнику и автоматизацию.
Основной задачей Include servo h является упрощение интеграции сервомоторов в проект. Он предоставляет набор функций для инициализации, настройки и управления движением сервомоторов, включая настройку углов поворота и скорости. Для корректного использования важно правильно подключить этот файл и настроить параметры сервомотора в коде.
Для использования Include servo h необходимо сначала подключить его к проекту с помощью директивы #include «servo.h». После этого можно создавать экземпляры объектов сервомоторов, задавать углы и управлять их движением с помощью встроенных функций. Важно следить за корректностью подключения и питания сервомоторов, поскольку неправильная настройка может привести к сбоям в работе системы.
Определение Include servo h и его роль в программировании

Роль Include servo h заключается в предоставлении простого интерфейса для работы с сервоприводами. Вместо того чтобы разрабатывать алгоритмы управления с нуля, программист может использовать уже готовые функции из библиотеки, значительно ускоряя процесс разработки. Это особенно полезно в робототехнике и автоматизации, где требуется точное и надежное управление движением.
Функции, предоставляемые Include servo h, позволяют легко интегрировать сервоприводы в проекты, минимизируя количество ошибок, связанных с расчетами и управлением. Использование этого файла повышает читаемость и сопровождаемость кода, так как все ключевые операции по работе с сервами инкапсулированы в одну библиотеку.
Основные функции Include servo h в управлении сервоприводами

Библиотека servo.h предоставляет набор функций для управления сервоприводами в программировании для платформы Arduino. Она позволяет легко и эффективно подключать и управлять сервоприводами, обеспечивая точное позиционирование с помощью сигналов PWM (широтно-импульсной модуляции).
Одна из ключевых функций – Servo.attach(), которая инициализирует подключение сервопривода к определенному пину. Эта функция также позволяет установить минимальное и максимальное значение угла для движения сервопривода, что важно для точности работы устройства.
Функция Servo.write() используется для задания угла поворота сервопривода. Аргументом является угол от 0 до 180 градусов, что позволяет задавать точное положение сервопривода в заданном диапазоне.
С помощью функции Servo.read() можно узнать текущий угол поворота сервопривода, что полезно для контроля состояния и синхронизации работы с другими устройствами.
Для управления скоростью движения используется функция Servo.writeMicroseconds(), которая задает длительность импульса PWM в микросекундах. Эта функция дает более точный контроль над движением сервопривода по сравнению с Servo.write().
Важной особенностью является возможность управления несколькими сервоприводами одновременно. Для этого необходимо использовать несколько экземпляров класса Servo, каждый из которых будет управлять отдельным сервоприводом, подключенным к своему пину.
Как правильно подключить Include servo h к проекту
Для использования библиотеки Include servo h в проекте на платформе Arduino, необходимо выполнить несколько шагов. Важно подключить соответствующие файлы и настроить нужные параметры сервоприводов.
Первым шагом является подключение библиотеки. В коде проекта нужно добавить строку: #include . Это подключит необходимые функции для управления сервоприводами, включая инициализацию, управление углом поворота и другие возможности.
Далее необходимо создать объект класса Servo, который будет представлять конкретный сервопривод. Для этого используйте конструкцию: Servo myservo;. Это создаст объект, с помощью которого можно будет управлять сервоприводом.
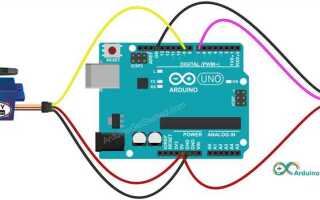
После этого следует инициализировать пин, к которому подключен сервопривод. Для этого в функции setup() вызываем метод attach(), передав номер пина. Пример: myservo.attach(9);, если сервопривод подключен к пину 9 на плате Arduino.
В функции loop() можно прописывать команды для управления углом сервопривода. Для этого используйте метод write(), передавая в него угол поворота в градусах. Например: myservo.write(90);, что заставит сервопривод повернуться на 90 градусов.
Кроме того, важно помнить, что для правильной работы сервопривода необходимо обеспечить стабильное питание. Обычно для этого используется отдельный источник питания для сервоприводов, так как Arduino может не обеспечивать достаточную мощность для нормальной работы нескольких сервомоторов.
Подключив Include servo h к проекту и правильно настроив все компоненты, вы сможете эффективно управлять сервоприводами и создавать различные механизмы для вашего проекта.
Параметры и настройки для работы с Include servo h
Для корректной работы с библиотекой servo.h необходимо правильно настроить параметры сервоприводов и их управление. Основные параметры включают угол поворота, скорость и диапазон движения. Каждый из них влияет на работу системы, и их настройка требует точности и правильного подхода.
Вот несколько ключевых параметров для работы с Include servo h:
- Минимальный угол (min_angle): Указывает минимальное значение угла для сервопривода. Обычно это 0°.
- Максимальный угол (max_angle): Указывает максимальный угол, который может достичь сервопривод. Часто используется диапазон от 0° до 180°.
- Шаг угла (angle_step): Определяет, с каким интервалом будет изменяться угол поворота. Меньший шаг позволяет получить более точное управление.
- Скорость (speed): Параметр, который регулирует, как быстро сервопривод будет двигаться от одного угла к другому. Это важный параметр для динамических проектов.
- Период обновления сигнала (signal_period): Время, через которое обновляется позиция сервопривода. Зависит от частоты сигнала ШИМ (широтно-импульсной модуляции).
- Питание (power_supply): Убедитесь, что сервопривод получает достаточно питания. Для большинства моделей требуется стабильное питание 5-6 Вольт.
В процессе настройки важно учитывать следующие аспекты:
- При изменении угла сервопривода необходимо проверять его поведение на каждом шаге, чтобы избежать механических повреждений или перегрузки.
- Для работы с несколькими сервоприводами следует учесть, что каждый из них может иметь свои особенности в потреблении энергии и характеристиках работы, что важно при подключении нескольких устройств одновременно.
- Правильная настройка частоты ШИМ может существенно повлиять на точность и стабильность работы системы.
Для настройки библиотеки и параметров в вашем проекте используйте функции, такие как Servo.attach() для присоединения к пину, а также Servo.write() для установки угла. Оптимальные параметры зависят от типа используемого сервопривода и требований вашего проекта.
Ошибки при использовании Include servo h и способы их устранения
Еще одна ошибка – неправильная установка пинов для управления сервоприводами. Это может привести к некорректной работе устройства или его полной остановке. Проверьте, что пины, указанные в коде, совпадают с физическим подключением сервоприводов к микроконтроллеру.
При работе с Include servo h возможна ошибка в расчетах при определении угла поворота. Если значения угла выходят за допустимые пределы (обычно от 0 до 180 градусов), это может вызвать сбой или неправильную работу сервопривода. Убедитесь, что параметры углов корректно ограничены.
Некорректное использование задержек также может стать причиной проблем. Вставка длительных пауз в коде может привести к плохому отклику системы или к ее зависаниям. Оптимизируйте время задержек, чтобы избежать излишней нагрузки на процессор и избежать ошибок в синхронизации.
Еще одна распространенная ошибка – отсутствие проверки состояния сервоприводов перед их использованием. Иногда возникает ситуация, когда сервопривод не получает команды из-за неправильной или неполной настройки. Для предотвращения таких ситуаций добавьте проверку на наличие активных сигналов перед отправкой команды на сервопривод.
Наконец, важно убедиться, что библиотека Include servo h совместима с используемой платформой или микроконтроллером. Если используются устаревшие версии библиотек или несоответствующие конфигурации, это может вызвать конфликты и сбои. Регулярно обновляйте библиотеки и следите за совместимостью.
Рекомендации по оптимизации работы с Include servo h
Важно следить за правильностью и актуальностью параметров, передаваемых в функции управления сервоприводами. Определение оптимальных значений для скорости и угловых изменений позволяет избежать ненужных вычислений и ускоряет отклик системы. Рекомендуется использовать ограничения для предельных значений, что предотвращает перегрузку сервоприводов и улучшает их стабильность.
При использовании нескольких сервоприводов в одном проекте стоит учитывать возможность параллельной работы. Для этого необходимо правильно настроить последовательность команд и убедиться, что обработка каждого сигнала происходит в оптимальные сроки, чтобы избежать задержек и конфликтов в работе оборудования.
Также стоит учитывать возможность использования буферизации команд для более плавного движения сервоприводов. Это позволяет снизить нагрузку на контроллер и улучшить стабильность работы при сложных движениях. Важно провести тестирование на разных нагрузках и настройках, чтобы найти баланс между производительностью и точностью.
Наконец, оптимизация кода является не менее важной частью работы с Include servo h. Использование более быстрых алгоритмов для расчёта углов и скорости, а также избегание лишних вычислений в цикле управления сервоприводами поможет снизить время отклика и увеличить эффективность работы всей системы.
Примеры кода с использованием Include servo h в реальных проектах

В данном разделе рассмотрим несколько примеров использования библиотеки Include servo h для управления сервоприводами в реальных проектах.
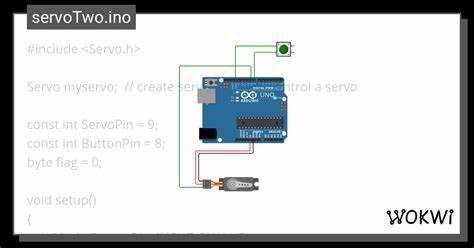
Пример 1: Управление сервоприводом с помощью стандартных команд
#includeServo myServo; // Создание объекта сервопривода void setup() { myServo.attach(9); // Подключение к пину 9 } void loop() { myServo.write(90); // Установка угла в 90 градусов delay(1000); // Задержка 1 секунда myServo.write(0); // Установка угла в 0 градусов delay(1000); // Задержка 1 секунда }
В этом примере создается объект сервопривода, который подключается к пину 9. В цикле сервопривод поочередно поворачивается в два угла: 90 и 0 градусов с задержкой 1 секунда.
Пример 2: Управление несколькими сервоприводами
#includeServo servo1, servo2; // Создание двух объектов для двух сервоприводов void setup() { servo1.attach(9); // Подключение первого сервопривода servo2.attach(10); // Подключение второго сервопривода } void loop() { servo1.write(45); // Поворот первого сервопривода на 45 градусов servo2.write(135); // Поворот второго сервопривода на 135 градусов delay(1000); // Задержка 1 секунда }
В этом примере два сервопривода управляются независимо друг от друга. Каждый подключен к своему пину, и каждый вращается на заданный угол.
Пример 3: Использование переменных для управления углом
#includeServo myServo; int angle = 0; // Начальный угол void setup() { myServo.attach(9); } void loop() { myServo.write(angle); // Установка угла сервопривода angle += 15; // Увеличение угла на 15 градусов if (angle > 180) { // Если угол больше 180, сбросить его на 0 angle = 0; } delay(500); // Задержка 0.5 секунды }
В данном примере угол сервопривода постепенно увеличивается на 15 градусов в каждой итерации. Когда угол достигает 180 градусов, он сбрасывается до 0.
Пример 4: Управление сервоприводом с использованием аналогового датчика
#includeServo myServo; int sensorValue = 0; // Переменная для хранения значения с датчика void setup() { myServo.attach(9); // Подключение сервопривода pinMode(A0, INPUT); // Настройка пина для аналогового входа } void loop() { sensorValue = analogRead(A0); // Чтение значения с датчика int angle = map(sensorValue, 0, 1023, 0, 180); // Преобразование значения в угол myServo.write(angle); // Установка угла в зависимости от значения с датчика delay(15); // Задержка для плавного движения }
Этот пример использует аналоговый датчик для управления углом сервопривода. Значение с датчика преобразуется в угол от 0 до 180 градусов.
Эти примеры показывают различные способы применения библиотеки Include servo h для управления сервоприводами, от простого управления до интеграции с датчиками и работы с несколькими устройствами одновременно.
Особенности использования Include servo h с различными типами сервоприводов
Include servo h предоставляет возможности управления различными типами сервоприводов, от стандартных до более сложных, с применением различных механизмов регулировки. Работая с ним, важно учитывать характеристики каждого типа привода, чтобы обеспечить оптимальную работу системы.
Для обычных сервоприводов, которые используют стандартные аналоговые сигналы управления, библиотека позволяет просто задавать угол поворота с использованием функции servo.write(angle). Это подходит для простых проектов, где требуется базовое управление углом.
Сервоприводы с цифровым управлением требуют использования более специфичных настроек. В таких случаях, при работе с библиотекой, важно учитывать точность и скорость отклика. Например, для высокоскоростных сервоприводов нужно оптимизировать время задержки между командами, чтобы избежать перегрузки сигналов.
При использовании сервоприводов с возвратной связью важно настроить соответствующие параметры, такие как пределы углов или скорость вращения. Это поможет избежать повреждений, обеспечивая стабильность работы системы. В таких случаях можно использовать функции для отслеживания положения в реальном времени и для корректировки управления в зависимости от данных, получаемых от привода.
Особое внимание стоит уделить сервоприводам с различной подачей тока, поскольку они могут требовать дополнительных защитных схем или распределения нагрузки через транзисторы или MOSFET. В случае работы с такими сервоприводами важно заранее проверять совместимость питания и уровень тока, чтобы избежать перегрузки.
Для серво с высоким крутящим моментом важно использовать более сложные алгоритмы управления, включающие интерполяцию движения для плавных переходов между углами. Это улучшает точность и уменьшает износ механизма. Библиотека Include servo h предоставляет функции, которые позволяют настроить параметры скорости и ускорения для таких приложений.
Таким образом, при использовании Include servo h с различными типами сервоприводов следует тщательно учитывать их спецификации и особенности работы, чтобы оптимизировать функциональность и повысить надежность системы управления.
Вопрос-ответ:
Что такое Include servo h и для чего его используют?
Include servo h — это директива для подключения библиотеки или кода, который позволяет работать с сервоприводами в программировании на языке C/C++. Она упрощает интеграцию управлением сервоприводами в различные проекты, например, робототехнику или автоматизацию. С помощью этой библиотеки можно быстро настроить сервопривод, управлять его положением, скоростью и другими параметрами, не создавая каждый раз новый код для базовых операций.
Как правильно подключить Include servo h к проекту?
Для того чтобы использовать Include servo h, нужно сначала убедиться, что соответствующая библиотека установлена в проекте. Обычно достаточно добавить строку #include
Какие функции доступны в библиотеке Include servo h для управления сервоприводами?
Библиотека Include servo h предоставляет несколько важных функций для работы с сервоприводами. Одной из основных является функция attach(), которая связывает объект сервопривода с определенным пином микроконтроллера. Функция write() позволяет задать угловое положение сервопривода, а writeMicroseconds() — задает точное время для движения в микросекундах. Также можно использовать функцию detach(), чтобы отсоединить сервопривод, если он больше не используется.
Можно ли использовать Include servo h с любыми сервоприводами?
Да, библиотека Include servo h совместима с большинством стандартных сервоприводов, которые работают на основе PWM-сигнала. Однако важно учитывать характеристики конкретного сервопривода, такие как рабочее напряжение и максимальный ток, чтобы избежать повреждения оборудования. Для некоторых более сложных или нестандартных сервоприводов могут понадобиться дополнительные настройки или драйвера, которые обеспечат правильную работу с библиотекой.